
高性能贴片机普遍采用视觉对中系统。视觉对中系统运用数字图像处理技术,当贴片头上的吸嘴吸取元件后,在移到贴片位置的过程中,由固定在贴片头上的或固定在机身某个位置上的照相机获取图像,并且通过影像探测元件的光密度分布,这些光密度以数字形式再经过照相机上许多细小精密的光敏元件组成的CCD阵列,输出0~255级的灰度值。灰度值与光密度成正比,灰度值越大,则数字化图像越清晰。数字化经存储、编码、放大、整理和分析,将结果反馈到控制单元,并把处理结果输出到伺服系统中去调整补偿元件吸取的位置偏差,完成贴片操作。
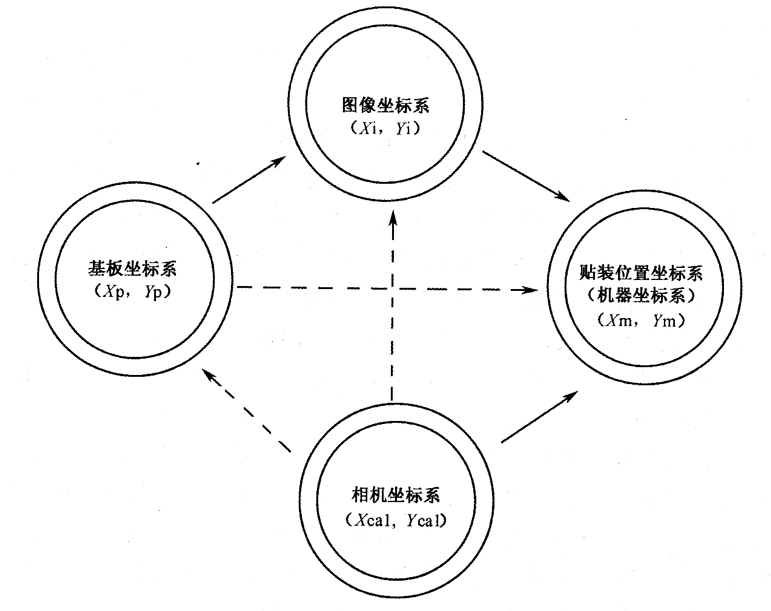
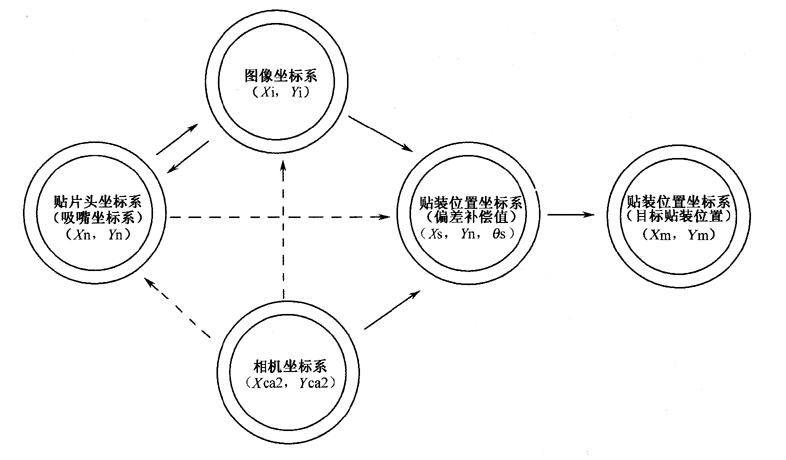
那么,机器通过对PCB上的基准点和元器件照相后,怎么来实现贴装位置自动矫正并实现贴装的昵?这一过程是机器通过一系列的坐标系之间的转换来定位元件的贴装目标的。我们通过贴装过程来阐述系统的工作原理。首先PCB通过传送装置被传输到固定位置并被夹板机构固定,贴片头移至PCB基准点上方,头上相机对PCB上基准点照相。这时候存在4个坐标系:基板坐标系(Xp,Yp)、头上相机坐标系(Xca1,Ycal)、图像坐标系(Xi,Yi)和机器坐标系(Xm,Ym)。对基准点照相完成后,机器将基板坐标系通过与相机和图像坐标系的关联转换到机器坐标系中,这样目标贴装位置确定。然后贴片头拾取元件后移动到固定相机的位置,固定相机对元件进行照相。这时同样存在4个坐标系:贴片头坐标系也是吸嘴坐标系(Xn,Yn)、固定相机坐标系(Xca2,Yca2)、图像坐标系(Xi,Yi)和机器坐标系(Xm,Ym)。对元件照相完成后,机器在图像坐标系中计算出元件特征的中心位置坐标,通过与相机和图像坐标系的关联转换到机器坐标系中,此时在同一坐标系中比较元件中心坐标和吸嘴中心坐标。两个坐标的差异就是需要的位置偏差补偿值。然后根据同一坐标系中确定的目标贴装位置,机器控制单元和伺服系统就能控制机器进行贴装了。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判定结果的传感器。
拍摄到的图像进行图像处理,来计算对象物的特征量(面积、重心、长度、位置等),并输出数据和判定结果的传感器。
BOREY T11-L1200V○最大电路板面积:1215×315mm○XY最大移动范围:432×515mm○Z轴最大移动范围:20mm○最大
BOREYT11-L600V○最大电路板面积:615×265mm○XY最大移动范围:432×515mm○Z轴最大移动范围:20mm○最大
BOREY T13-V4○最大电路板面积:357×367mm○XY最大移动范围:432×515mm○Z轴最大移动范围:20mm○最大
硬件和软件组成。硬件一般由影象探测,影象存储和处理以及影象显示3部分组成。
定位示意图如图2所示。当一块新的待贴装PCB通过送板机构传送到指定位置圃定起来,安装在
。数字图像处理是一门跨学科的前沿高科技,简单地说,数字图像就是把需处理的模拟图像数字化,经过计算机对离散
在提高检测精度和增强可检测性等方面独到的优越性,随着自动化技术水平的提高,激光和机器
。因此,必须依据科学的保养方法和技术规范,定期对机器设备做保养,使机器各部件始终
供料器,又称送料器或喂料器,供料器及其承载安装机构和检验测试的机构组成的供料
能容纳各种相应包装形式的元件,是将元件传送到取料部位的一种储料供料机构。元件以编带
的照相机分辨率每个像素达到0.038 mm。随着精密制造技术的发展,这些指标还会促进提高,从而保证
结构最重要的包含下面两方面,这两方面主要实现的是点对点的位置控制。(1)位置和速度反馈都来自伺服电动机本身这种控制方式的优点是对整个闭环伺服
)、指示灯和其他异型元件。元件的包装方式也各种各样,有卷带装(Tape&Reel)、管装(Tube)、盘装(Tray)和盒装(Bulk)等。而
平台本身作为功能模块来设计,即对任一功能部件,根据其应用场景范围的不同来设计和制造适合使用的范围不一的模块,同时又在
中保留统一的外部接口(机械上和电气上),以保证所有模块化设计的功能部件
、光源及控制等)和电子电路与计算机(包括传感器电路、图像处理、各种电子控制电路及工业计算机
气动原理图图3是停板和夹板机构气动原理图。图3 停板和夹板机构气动原理图图4是板支撑气动原理图。图4 板支撑气动原理图现在以吸嘴更换器为例,说明其气动
与主机的硬件连接是在以太网上的TCP/IP网络使用下列之一:①带有RJ-45连接器的10Base-T型绞股线
不同的元器件制造厂在生产同样规格的器件时,由于是大批量生产,元件的外形如端头尺寸会有较大的离散性,有时甚至会存在很大的差异,以0201为例说明,如图1所示。由于
设备还可按照设备的灵活性和生产能力进行分类。灵活性越高,产额越低。例如,机器人是一种灵活性极高的
,可用于贴装表面贴装元件、涂敷焊模或焊膏、焊接以及引线镀锡,其硬件成本相当低,但软件和硬件开发却十分昂贵。机器人虽然很灵活,但
在一些较复杂的电子科技类产品中,往往会有几百、上千个元件,而且元件会有从小到大各种各样的类型。如果只用 一台
来贴装所有元件,有的元件可能不能吸取;有的元件可能超过了识别范围,而单板贴装时间可能会
最常用的结构。这种结构自从⒛世纪80年代问世以来,很长一段时问都是高速
中不需要更换吸嘴。也就是说,任何吸嘴都能随时拾取元件,取消过多的和不必要的运行操作步骤。·
销售公司,日立F8是日立公司最新研发推出的最具性价比,速度最快,精度最高的
,目前应用在国内如:富士康,伟创力等大厂,很适合贴装要求精度高的如:主板,平板电脑等。公司
本公司是一家无尘老牌SMT精品制造企业,因打算更换新设备,将现有雅马哈100 II型号
贴装元件器坐标值为(0,0),进行重复多次对此点贴装,每次之间的偏差值就是重复精度。准确地说,每个运动
导致的,如果大家一开机就出现发热的情况,那么大家就要检查设备的内部问题了,要及时的进行修复。2、当我们的设备发生故障时,自然是想要做好修复
中,实现了电子装配设备的一体化。一台这样的设备就能够实现电子装配生产线上多个工艺流程,代替了传统上的组合式生产线。显而易见,由于功能一体化的特点,这种“
BOREY T11-S24FC○最大电路板面积:357×367mm○XY最大移动范围:432×515mm○Z轴最大移动范围:20mm○最大
的成像光学条件等,调整自身各部分的状态参数,使其能达到一个最佳成像状态,从而使
中大多采用全闭环伺服电动机驱动,用线性光栅尺编码器来进行直接位置反馈,避免因丝杆扭曲变形的误差
随着电子设备对小型、轻型、薄型和可靠性的需求,促使各种新型器件,特别是细间距、微细间距器件得到迅速发展,被慢慢的变多地用于各类电子设备上,于是对SMT中的关键设备——
就有两个动臂贴装头,当一个动臂贴装头贴装元件时,另一个动臂贴装头同时在拾取贴装元件
:YV100X YV100XE YV100XG YV100XGP YG100
的同时,也需要对其来维护,那么为什么要维护它吗?又该如何维护呢?接下来跟随SMT设备一起来了解一下吧:一、对
。它处理的是二维图像,是基于对无遮挡物体颜色和形状的识别以及3D目标物体的平动跟踪。
元件分为CHIP,SOIC,QFP,BGA和CSP等类型。如果采用单一
头和多吸嘴结构;·智能供料及检测;·高速、高精度线性电动机驱动;·高速、灵活、智能
左右方向不断移动,将装有待吸取元件的送料器移动到吸取位置。PCB沿x-y方向运行,使PCB精确地定位于规定的
,一般来说是SMT中最关键、最昂贵的设备,是一种贴装电子元器件的设备,其
在重要部件如贴装主轴、动/ 静镜头、吸嘴座、送料器上进行了Mark(直径为1.00mm 的圆孔) 标识, 机器
。数字图像处理是一门跨学科的前沿高科技,简单地说,数字图像就是把需处理的模拟图像数字化,经过计算机对离散的数据来进行一系列的有目的处理计算,输出成人们需要的处理结果。
定位示意图如图2所示。当一块新的待贴装PCB通过送板机构传送到指定位置圃定起来,安装在
头上的基准(MARK点)照相机CCD3在相应的区域通过图像识别算法搜寻出MARK点,并由
软件计算出其在坐标系中的坐标,同时将相应的元器件应贴装的位置数据送给主控计算机。
手机:188 2685 9701(微信同号)
安博体育能玩吗/安博电竞app安卓版-安博ios官网下载
地址东莞市寮步镇向西村村口街3号厂房

